Paper in IROS 2012: "Linguistic Transfer of Human Assembly Tasks to Robots"
Citation
[bibtex key= 2012-Dantam-LTHATR]
Abstract
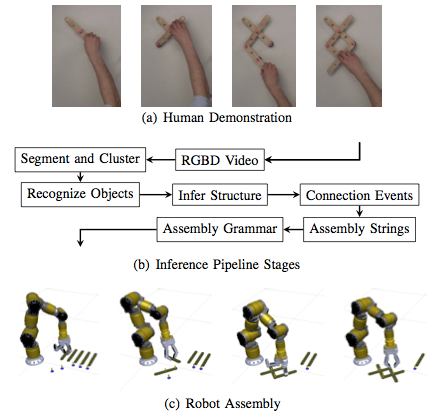
We demonstrate the automatic transfer of an assembly task from human to robot. This work extends efforts showing the utility of linguistic models in verifiable robot control policies by now performing real visual analysis of human demonstrations to automatically extract a policy for the task. This method tokenizes each human demonstration into a sequence of object connection symbols, then transforms the set of sequences from all demonstrations into an automaton, which represents the task-language for assembling a desired object. Finally, we combine this assembly automaton with a kinematic model of a robot arm to reproduce the demonstrated task.
Presented at: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2012), October 7-12, 2012 Vilamoura, Algarve, Portugal.