Paper in NeurIPS 2022 on “VER: Scaling On-Policy RL Leads to the Emergence of Navigation in Embodied Rearrangement”
Abstract
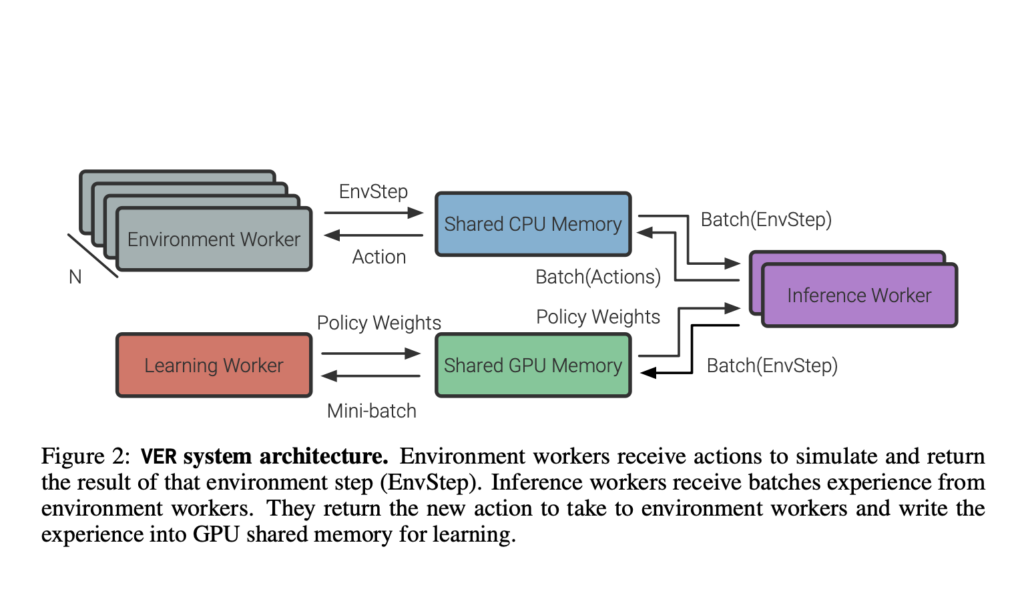
We present Variable Experience Rollout (VER), a technique for efficiently scaling batched on-policy reinforcement learning in heterogenous environments (where different environments take vastly different times to generate rollouts) to many GPUs residing on, potentially, many machines. VER combines the strengths of and blurs the line between synchronous and asynchronous on-policy RL methods (SyncOnRL and AsyncOnRL, respectively). Specifically, it learns from on-policy experience (like SyncOnRL) and has no synchronization points (like AsyncOnRL) enabling high throughput.
We find that VER leads to significant and consistent speed-ups across a broad range of embodied navigation and mobile manipulation tasks in photorealistic 3D simulation environments. Specifically, for PointGoal navigation and ObjectGoal navigation in Habitat 1.0, VER is 60-100% faster (1.6-2x speedup) than DD-PPO, the current state of art for distributed SyncOnRL, with similar sample efficiency. For mobile manipulation tasks (open fridge/cabinet, pick/place objects) in Habitat 2.0 VER is 150% faster (2.5x speedup) on 1 GPU and 170% faster (2.7x speedup) on 8 GPUs than DD-PPO. Compared to SampleFactory (the current state-of-the-art AsyncOnRL), VER matches its speed on 1 GPU, and is 70% faster (1.7x speedup) on 8 GPUs with better sample efficiency.
We leverage these speed-ups to train chained skills for GeometricGoal rearrangement tasks in the Home Assistant Benchmark (HAB). We find a surprising emergence of navigation in skills that do not ostensible require any navigation. Specifically, the Pick skill involves a robot picking an object from a table. During training the robot was always spawned close to the table and never needed to navigate. However, we find that if base movement is part of the action space, the robot learns to navigate then pick an object in new environments with 50% success, demonstrating surprisingly high out-of-distribution generalization.
Paper / Citation
VER: Scaling On-Policy RL Leads to the Emergence of Navigation in Embodied Rearrangement Proceedings Article
In: Oh, Alice H., Agarwal, Alekh, Belgrave, Danielle, Cho, Kyunghyun (Ed.): Advances in Neural Information Processing Systems (NeurIPS), 2022.