Award-winning paper in ICLR 2023 on “Emergence of Maps in the Memories of Blind Navigation Agents”
Paper / Citation
This paper was awarded the best paper award by ICRL 2023.
Abstract
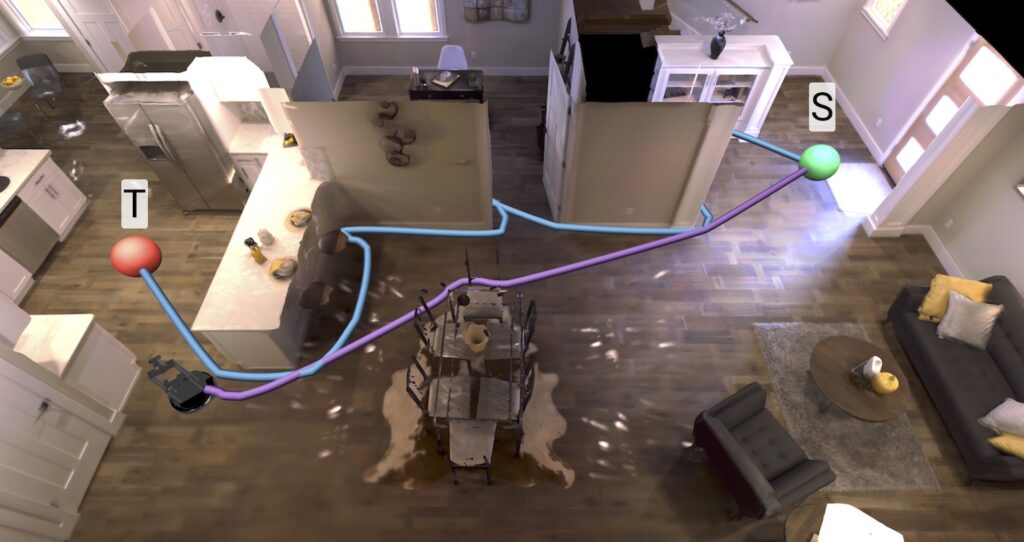
Animal navigation research posits that organisms build and maintain internal spatial representations, or maps, of their environment. We ask if machines -- specifically, artificial intelligence (AI) navigation agents -- also build implicit (or 'mental') maps. A positive answer to this question would (a) explain the surprising phenomenon in recent literature of ostensibly map-free neural-networks achieving strong performance, and (b) strengthen the evidence of mapping as a fundamental mechanism for navigation by intelligent embodied agents, whether they be biological or artificial. Unlike animal navigation, we can judiciously design the agent's perceptual system and control the learning paradigm to nullify alternative navigation mechanisms. Specifically, we train 'blind' agents -- with sensing limited to only egomotion and no other sensing of any kind -- to perform PointGoal navigation ('go to Δ x, Δ y') via reinforcement learning. Our agents are composed of navigation-agnostic components (fully-connected and recurrent neural networks), and our experimental setup provides no inductive bias towards mapping. Despite these harsh conditions, we find that blind agents are (1) surprisingly effective navigators in new environments (~95% success); (2) they utilize memory over long horizons (remembering ~1,000 steps of past experience in an episode); (3) this memory enables them to exhibit intelligent behavior (following walls, detecting collisions, taking shortcuts); (4) there is emergence of maps and collision detection neurons in the representations of the environment built by a blind agent as it navigates; and (5) the emergent maps are selective and task dependent (e.g. the agent 'forgets' exploratory detours). Overall, this paper presents no new techniques for the AI audience, but a surprising finding, an insight, and an explanation.
Additional Information about this research effort
- Erik Wijmans’ Tweets
- Erik Wijmans’s Project Page.
- “AI with no visual sensors generates an internal map to finds its way” by Alex Wilkins, 20 February 2023, in the New Scientist.
Links
- https://arxiv.org/abs/2301.13261
- https://wijmans.xyz/publication/eom/
- https://openreview.net/forum?id=lTt4KjHSsyl
- https://blog.iclr.cc/2023/03/21/announcing-the-iclr-2023-outstanding-paper-award[...]
- doi:10.48550/ARXIV.2301.13261
BibTeX (Download)
@inproceedings{2023-Wijmans-EMMBNA,
title = {Emergence of Maps in the Memories of Blind Navigation Agents},
author = {Erik Wijmans and Manolis Savva and Irfan Essa and Stefan Lee and Ari S. Morcos and Dhruv Batra},
url = {https://arxiv.org/abs/2301.13261
https://wijmans.xyz/publication/eom/
https://openreview.net/forum?id=lTt4KjHSsyl
https://blog.iclr.cc/2023/03/21/announcing-the-iclr-2023-outstanding-paper-award-recipients/},
doi = {10.48550/ARXIV.2301.13261},
year = {2023},
date = {2023-05-01},
urldate = {2023-05-01},
booktitle = {Proceedings of International Conference on Learning Representations (ICLR)},
abstract = {Animal navigation research posits that organisms build and maintain internal spatial representations, or maps, of their environment. We ask if machines -- specifically, artificial intelligence (AI) navigation agents -- also build implicit (or 'mental') maps. A positive answer to this question would (a) explain the surprising phenomenon in recent literature of ostensibly map-free neural-networks achieving strong performance, and (b) strengthen the evidence of mapping as a fundamental mechanism for navigation by intelligent embodied agents, whether they be biological or artificial. Unlike animal navigation, we can judiciously design the agent's perceptual system and control the learning paradigm to nullify alternative navigation mechanisms. Specifically, we train 'blind' agents -- with sensing limited to only egomotion and no other sensing of any kind -- to perform PointGoal navigation ('go to Δ x, Δ y') via reinforcement learning. Our agents are composed of navigation-agnostic components (fully-connected and recurrent neural networks), and our experimental setup provides no inductive bias towards mapping. Despite these harsh conditions, we find that blind agents are (1) surprisingly effective navigators in new environments (~95% success); (2) they utilize memory over long horizons (remembering ~1,000 steps of past experience in an episode); (3) this memory enables them to exhibit intelligent behavior (following walls, detecting collisions, taking shortcuts); (4) there is emergence of maps and collision detection neurons in the representations of the environment built by a blind agent as it navigates; and (5) the emergent maps are selective and task dependent (e.g. the agent 'forgets' exploratory detours). Overall, this paper presents no new techniques for the AI audience, but a surprising finding, an insight, and an explanation.},
keywords = {awards, best paper award, computer vision, google, ICLR, machine learning, robotics},
pubstate = {published},
tppubtype = {inproceedings}
}