Paper in CVPR 2014 “Efficient Hierarchical Graph-Based Segmentation of RGBD Videos”
Abstract
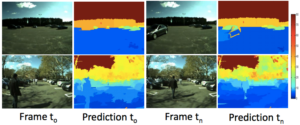
We present an efficient and scalable algorithm for seg- menting 3D RGBD point clouds by combining depth, color, and temporal information using a multistage, hierarchical graph-based approach. Our algorithm processes a moving window over several point clouds to group similar regions over a graph, resulting in an initial over-segmentation. These regions are then merged to yield a dendrogram using agglomerative clustering via a minimum spanning tree algorithm. Bipartite graph matching at a given level of the hierarchical tree yields the final segmentation of the point clouds by maintaining region identities over arbitrarily long periods of time. We show that a multistage segmentation with depth then color yields better results than a linear combination of depth and color. Due to its incremental process- ing, our algorithm can process videos of any length and in a streaming pipeline. The algorithm’s ability to produce robust, efficient segmentation is demonstrated with numerous experimental results on challenging sequences from our own as well as public RGBD data sets.
Video
Citation
[bibtex file=IrfanEssaWS.bib key= 2014-Hickson-EHGSRV]